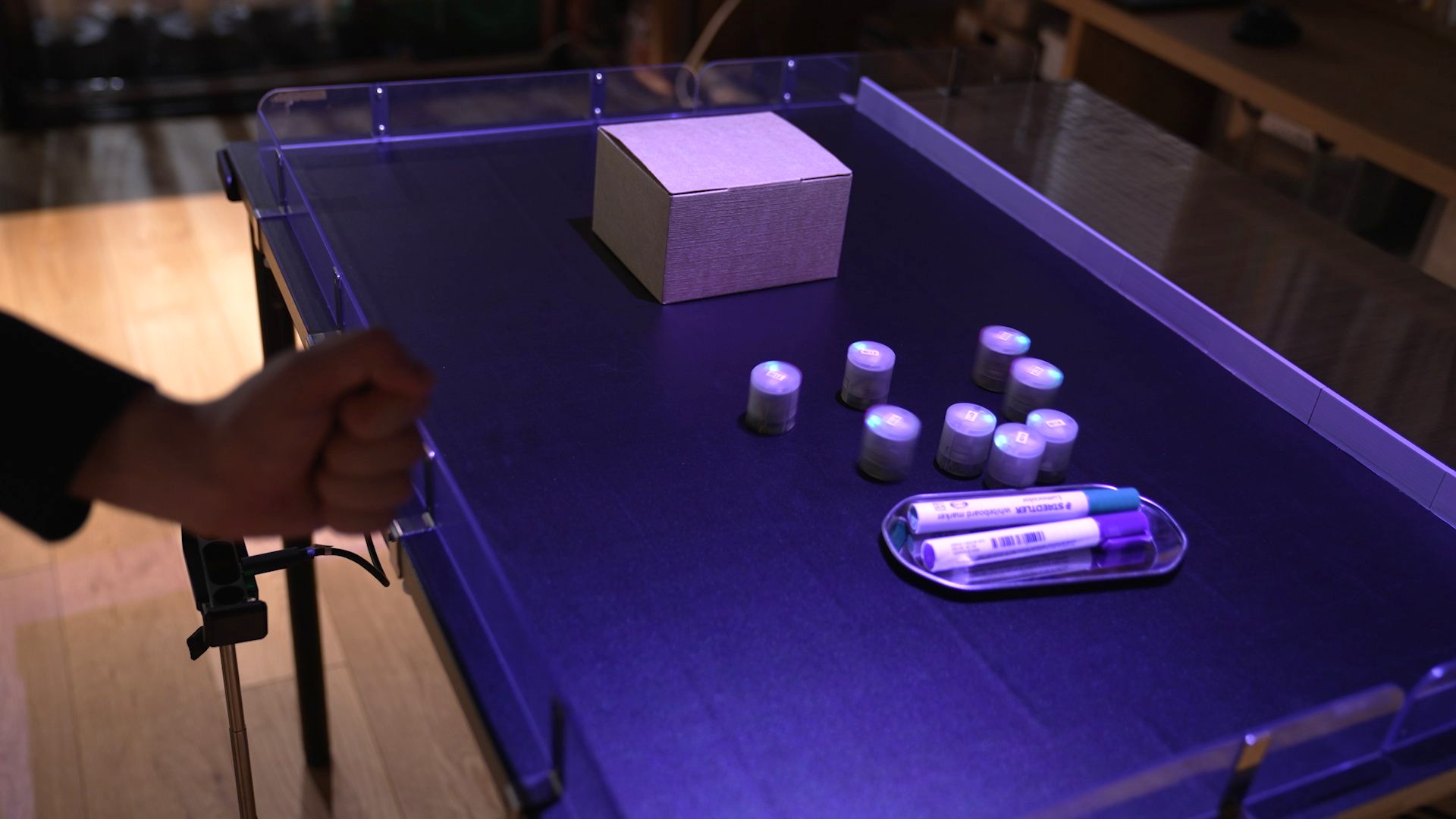
FluidicSwarm: Embodiment of Swarm Robots Using Fluid Behavior Imitation
(ACM SIGGRAPH 2025 ETech)
We proposed FluidicSwarm, a control system that treats robot swarms as fluid-like entities, enabling users to intuitively operate them as extensions of their own bodies. The system allows users to manipulate the characteristics of the fluid that the robot swarm mimics through hand movements, thereby changing properties such as the swarm’s shape and flexibility. This functionality enables users to easily and flexibly control large numbers of robots for diverse tasks including obstacle avoidance and object transportation.
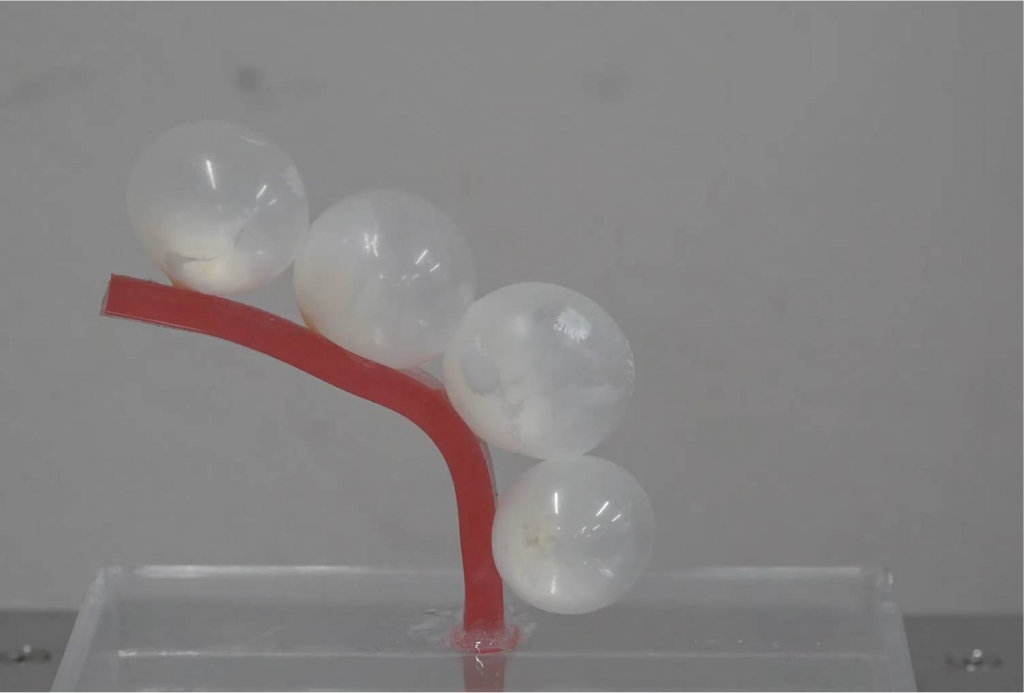
Micro Elastic Pouch Motors: Elastically Deformable and Miniaturized Soft Actuators Using Liquid-to-Gas Phase Change
(IEEE RA-L 2021, IEEE RoboSoft 2021)
We proposed Micro Elastic Pouch Motors, a largely deformable and miniaturized soft actuator that is made by an elastic rubber pouch with a low-boiling-point liquid. When the temperature of the low-boiling-point liquid reaches 34 ˚C, the liquid inside the pouch evaporates, and the whole structure inflates. Thanks to the proposed fabrication method, we can make a miniaturized pouch of approximately 5 mm in diameter with a thin rubber membrane, and the pouch can inflate to a volume of 86 times or more compared to its initial volume and can generate approximately 20 N at maximum.

CoVR: Co-located Virtual Reality Experience Sharing forFacilitating Joint Attention via Projected User-Perspective View
(ACM SIGGRAPH Asia 2020 ETech)
VR experience sharing between users wearing head-mounted displays (HMD users) and users not wearing HMDs (Non-HMD users) is a promising approach to bridge the experience gap between these users. We proposed “CoVR,” a co-located VR sharing system for the HMD and Non-HMD users via projected user-perspective images, using an HMD device with a head-mounted focus-free projector. We introduce a design methodology of displaying images considering the viewpoint and the perspective of images presented to the HMD and Non-HMD users with additional information to the images and demonstrate applications.